PhoenixD
| E-Mail: | stucki@match.uni-hannover.de |
| Team: | Martin Stucki, Rolf Wiemann, Niklas Terei, Lars Binnemann |
| Jahr: | 2019 |
| Förderung: | DFG |
| Weitere Informationen | https://www.phoenixd.uni-hannover.de |
Die Optikfertigung ist geprägt durch den Einsatz komplizierter, mehrstufiger Prozesse mit sehr hohen Genauigkeitsanforderungen. Hohe Variantenzahlen und kleine Stückzahlen erfordern zudem flexible und adaptive Produktionssysteme. Für die Optikproduktion der Zukunft verfolgt PhoenixD daher das Ziel, während der Fertigung nicht nur statisch die Prozessparameter, sondern in Echtzeit die gesamte Bauteilfunktion zu optimieren. In einem virtuellen Modell werden dazu die individuellen Eigenschaften jedes Bauteils prozessbegleitend aus Mess- und Simulationsdaten abgebildet.
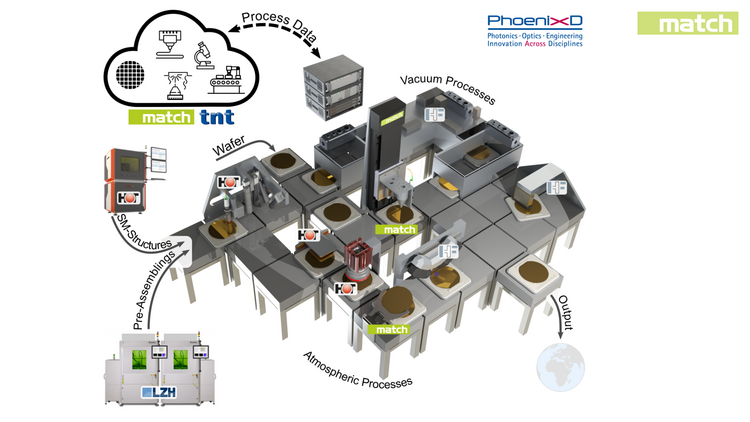
Zur Produktion neuentwickelter optischer Systeme wird in PhoenixD ein integriertes Produktionsnetzwerk entwickelt. In einem Inline-Produktionssystem werden dazu verschiedene Fertigungsprozesse wie Beschichtungs-, Druck- und Montageprozesse mit Inline-Messsystemen verknüpft. Das match befasst sich in diesem Kontext mit einem neuartigen Montagekonzept, bei dem ein magnetisches Levitationssystem nicht nur zum Werkstücktransport zwischen den einzelnen Produktionsprozessen, sondern gleichzeitig auch zum präzisen Bauteilhandling genutzt wird.
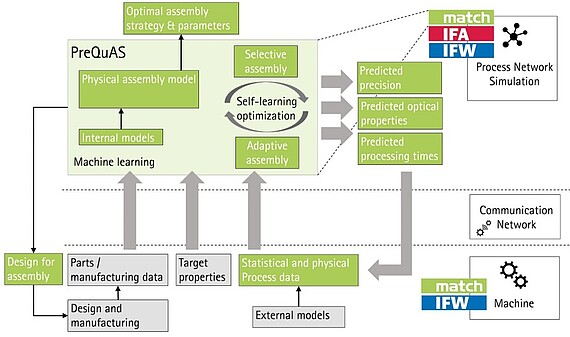
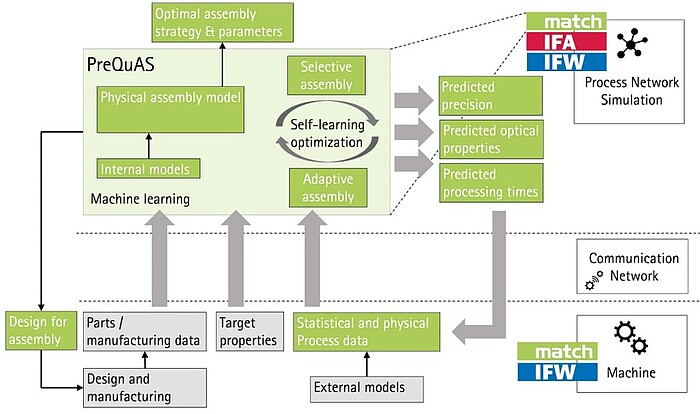
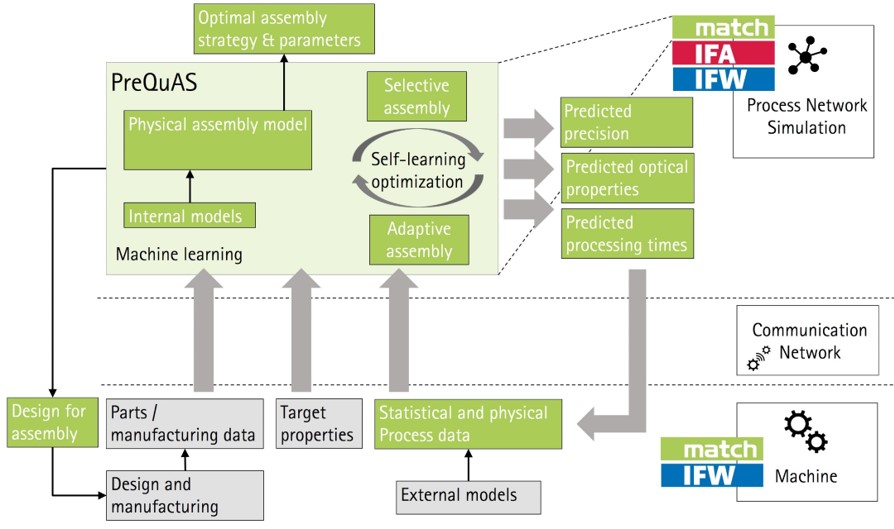
Des Weiteren wird an neuen Strategien zur Montage von photonisch integrierten Systemen geforscht. Neuartige Prozesslösungen sollen eine adaptive, effiziente und funktionsoptimierte Montage ermöglichen. Ein Ansatz dabei ist das Self-Assembly, wobei sich Komponenten durch ein spezielles Bauteildesign selbst positionieren und so ein präzises Handlingssystem obsolet werden lässt. Neben der Entwicklung von Montagekonzepten und entsprechender Hardware steht insbesondere die Nutzung von Prozess- und Simulationsdaten aus der gesamten Entwicklungs- und Produktionskette im Fokus. Die Zusammenfassung von Simulations-, Entwicklungs- und Fertigungsdaten der in PhoenixD entwickelten optischen Systeme in einem einheitlichen Datenformat soll sowohl eine Vorhersage der Montagequalität als auch sich selbst optimierende Montagesysteme ermöglichen.
Ansprechpartner: Martin Stucki, Niklas Terei, Lars Binnemann, Rolf Wiemann