Unteraktuierte Handhabungssysteme
| E-Mail: | recker@match.uni-hannover.de |
| Team: | Tobias Recker |
| Jahr: | 2017 |
Die Rekonfigurierbarkeit eines Fertigungssystems ist ein Schlüssel für Unternehmen, um schnell und kosteneffizient auf sich wandelnde Märkte reagieren zu können und konkurrenzfähig zu bleiben. So machen beispielsweise starke Schwankungen der Nachfrage von Produkten oder deren Variantenvielfalt in der Regel Anpassungen der Produktionssysteme notwendig. Hinsichtlich der Struktur, des Freiheitsgrads oder der Steuerung kann deren Modularität als ein charakteristisches Merkmal zur Sicherung eines hohen Maßes an Rekonfigurierbarkeit herausgestellt werden.
Vor diesem Hintergrund werden am match Orientierungssysteme mit passiven Drehgelenken erforscht, die beispielsweise als Greifermodul in bestehende Handhabungssysteme integriert werden können. Solche Systeme eröffnen einen Ansatz zur Freischaltung zusätzlicher Rotationsfreiheiten, während der Eingriff in die Dynamik des Robotersystems infolge der reduzierten zu bewegenden Masse gering gehalten werden kann. Bei diesem Ansatz wird auf den Kostentreiber Antrieb und damit auf viele bewegliche Teile des Antriebsstrangs verzichtet. So soll insbesondere der konstruktive Aufwand sowie die Kosten einer konventionellen vollständigen Aktuierung gleichwertiger Systeme umgangen werden.
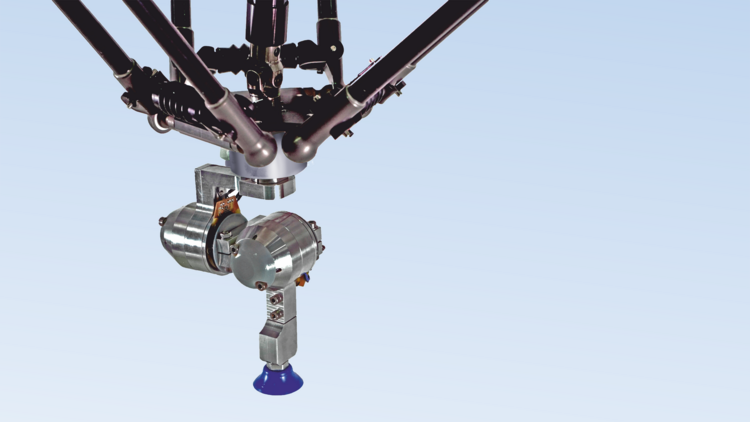
Der aktuelle Prototyp ist eine Erweiterungsstruktur für einen 4 dof delta-Parallelroboter. Sie besteht aus zwei Rotationsachsen in Form eines Kardangelenks und bildet zusammen mit der vorhandenen vertikalen Rotationsachse des Parallelroboters eine vollwertige Handachse mit vollem Orientierungsvermögen. Die Zielwinkel der passiven Achsen werden durch das geschickte Ausnutzen der Beschleunigungs-/Trägheitskräfte der Strukturkomponenten beim Verfahren des Parallelroboters im Handhabungsprozess eingestellt. Das Funktionsprinzip ist mit dem Schwingen eines Pendels vergleichbar, welches im Umkehrpunkt der Schwingung mittels einer Bremse festgesetzt wird.
Zentrale Forschungsthemen am match sind die aufgabenorientierte Synthese solcher Systeme sowie die Regelung des typischerweise nichtlinearen Systemverhaltens. Für den derzeitigen Prototyp ist eine energiebasierte Regelung im Einsatz, die zusätzlich die Positionierungs- und Orientierungsaufgabe unter Vorgabe der initialen und gewünschten Roboterkonfiguration zeitoptimal aufeinander abstimmt.
Weitere Informationen sind hier zu finden.



















