
















Entwicklung und Optimierung von Montage- und Handhabungsprozessen
Entwicklung und Optimierung von Handhabungs- und Montageprozessen
-
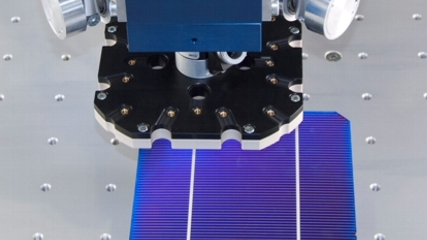
Handhabung von SolarzellenZiel des Projektes ist die anwendungsorientierte Untersuchung von Parallelrobotern zur hochdynamischen und schonenden Handhabung von Solarzellen. Dabei sollen alternative parallelkinematische Strukturen zur Handhabung von Solarzellen konzipiert und die Funktionsmuster des SFB 562 für diese industrielle Aufgabe bezüglich ihrer Einsatzfähigkeit untersucht werden.Team:Jahr: 2011Förderung: DFG
![]()
![]()
-
Bauteilschonende und anpassungsfähige DemontageEine „bauteilschonende und anpassungsfähige Demontage“ ist Bestandteil des DFG-geförderten Sonderforschungsbereiches 871 „Regeneration komplexer Investitionsgüter“. Dabei leitet die Demontage den Regenerationsprozess eines Flugzeugtriebwerks ein. Durch eine Automatisierung der Demontageprozesse und die Identifizierung der Prozessgrößen wird eine bauteilschonende Demontage trotz charakteristischer Unsicherheiten der Demontage ermöglicht.Team:Jahr: 2018Förderung: DFG
![]()
![]()
-
Automatisierte Prozesskette für die flexible Produktion von Photovoltaikmodulen (A3P)Für dieses Projekt wird ein Lastenheft für die automatisierte Handhabung aller Materialien für die flexible Modulherstellung erstellt. Es werden Konzepte für die Handhabung erstellt, die einzelnen Schritte aufeinander abgestimmt und im Hinblick auf Taktzeiten und Kosten optimiert. Die Erstellung eines digitalen Zwillings der Prozesskette stellt die Grundlage für zukünftige Projekte dar. Ein Hauptpunkt liegt auf der Untersuchung der Handhabungsprozesse der Glaselemente und der Laminiationsfolien.Team:Jahr: 2023Förderung: EFZN
![]()
![]()
Maschinenkonzepte und Systemintegration
-
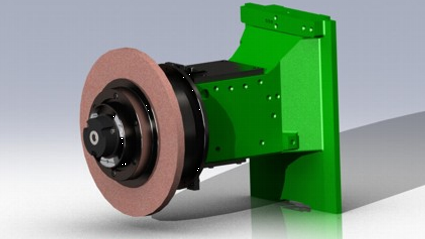
Aktive WerkzeugaufnahmeDas Forschungsziel ist die Steigerung der Produktivität von Werkzeugmaschinen mit rotierender Werkzeugaufnahme durch aktives Beeinflussen der Maschinenstruktur. Der begrenzende Faktor für die Leistung einer Werkzeugmaschine ist das dynamische und statische Verhalten. Werden Werkzeugmaschinen in den Grenzbereichen betrieben, kann es zu nicht gewollten Maschinenschwingungen kommen. Diese führen dazu, dass entweder die Bearbeitung der Werkstücke nicht beendet werden kann oder die gewählten Parameterwerte nicht die volle Maschinenleistung ausreizen.Team:Jahr: 2011Förderung: DFG
![]()
![]()
-
Kühlkonzepte auf Basis elektrokalorischer MaterialienElektrokalorische Materialien gehören neben magneto-, elasto- und barokalorischen Materialien zur Gruppe der aktiven Materialien und besitzen die Fähigkeit, sich unter Einwirkung eines elektrischen Feldes zu erwärmen bzw. abzukühlen. Das Ziel ist es hierbei, möglichst effiziente Systeme bei möglichst kompakter Bauweise und geringem Gewicht zu realisieren.Team:Jahr: 2012Förderung: DFG
-
iAeroIn Zusammenarbeit mit dem IFA (Institut für Fabrikanlagen und Logistik) soll in diesem Projekt eine aerodynamische Zuführanlage weiterentwickelt werden, damit Bauteile flexibel und mit hoher Stückzahl einem Folgeprozess zugeführt werden können. Basierend auf den Geometriedaten der Bauteile und einem Simulationsmodell des Orientierungsprozesses, soll die Anlage selbstständig die optimalen Einstellparameter identifizieren, einstellen und anwenden.Team:Jahr: 2017Förderung: DFG
![]()
![]()
Robotergestützte Montage- und Handhabungsvorgänge
-
3C-PKMDas Ziel des Projekts "Entwicklung einer parallelkinematischen Struktur für den 3C Anwendungsbereich" ist die Analyse und Weiterentwicklung der Kinematik eines Parallelroboters mit Delta-Struktur, um den Anforderungen der Handhabungs- und Montageaufgaben in der Elektronikmontage gerecht zu werden. Hierzu wird der Workflow eines möglichen Entwicklungsprozesses erarbeitet und relevante Randbedingungen sowie Zielparameter identifiziert.Team:Jahr: 2012Förderung: DFG
![]()
![]()
-
ProVorPlus (Funktionsintegrierte Prozesstechnologie zur Vorkonfektionierung und Bauteilherstellung von FVK-Metall-Hybriden)Um das wirtschaftliche Potenzial des FVK-basierten Leichtbaus zu steigern, wird die Herstellung von Komponenten mit einer bauteilintegrierten Hybridisierung angestrebt. Hierbei werden unterschiedliche Materialien mit verschiedenen Eigenschaften zu einem Bauteil kombiniert, wodurch eine Funktionalisierung (mechanisch, thermisch und elektrisch) der einzelnen Werkstoffe ermöglicht wird.Team:Jahr: 2015Förderung: BMBF
![]()
![]()
-
Generative Fertigung im BauwesenDie Fertigung von Betonbauteilen im Bauwesen folgt seit jeher dem traditionellen manuellen Prozess, bei dem Gebäude „Stein auf Stein“ errichtet und die verwendeten Betonelemente durch eine aufwendige Holzschalung hergestellt werden müssen. Zwar verfügt das Bauwesen über leistungsstarke Berechnungssoftware und Hochleistungsbetone, der Herstellungsprozess jedoch ist aufwendig und nicht automatisiert. An dieser Stelle setzt das oben genannte Projekt an. Das Ziel ist es, eine vollautomatisierte Fertigungszelle auf Roboterbasis zu nutzen, um generativ frei geformte Betonbauteile für den Hochbau herzustellen.Team:Jahr: 2016Förderung: MWK
![]()
![]()
-
Orientierungseinheiten mit SeilzugaktorikParallelroboter sind aufgrund ihrer hohen Taktraten sowie ihrer Positioniergenauigkeiten vor allem für Pick&Place-Operationen geeignet. Jedoch haben die parallel-kinematischen Strukturen einen entscheidenden Nachteil: Sie können Objekte exakt positionieren, aber nur eingeschränkt im Raum orientieren. Bestehende Montagezellen werden hierdurch unflexibel und lassen sich nur schwer an neue Prozesse anpassen. Am match entwickeln wir strukturelle Erweiterungen für Parallelroboter, mit denen Objekte beliebig im dreidimensionalen Raum orientiert werden können.Team:Jahr: 2016
![]()
![]()
-
SafeMateZiel des Forschungsvorhabens SafeMate ist es, kollaborative Montagesysteme in branchenübergreifenden Anwendungsfällen umzusetzen und hierauf aufbauend allgemeingültige Strategien und Konzepte für die Einführung und Gestaltung solcher Systeme zu entwickeln. Diese generellen Strategien sollen in einem Leitfaden zusammengefasst werden, der Unternehmen Orientierungshilfen im Sinne von Handlungs- und Entscheidungskorridoren bei der Gestaltung von kollaborativen Montagesystemen geben soll.Team:Jahr: 2017Förderung: BMBF
![]()
![]()
-
Wirtschaftliche Fertigung belastungsgerechter FVK/Metall-VerbundeIn Zusammenarbeit mit dem Institut für Umformtechnik und Umformmaschinen (IFUM) soll in diesem Projekt eine wirtschaftliche Fertigung belastungsgerechter FVK/Metall-Verbunde entwickelt und optimiert werden. Dabei sollen lokale FVK-Häufungen zwischen zwei Stahlblechen angeordnet und fixiert werden. Anschließend wird der Lagenaufbau in eine zweistufige Presse zur Imprägnierung und Umformung übergeben.Team:Jahr: 2018Förderung: EFB/AiF
![]()
![]()



























