Underactuated handling systems
| E-Mail: | recker@match.uni-hannover.de |
| Team: | Tobias Recker |
| Year: | 2017 |
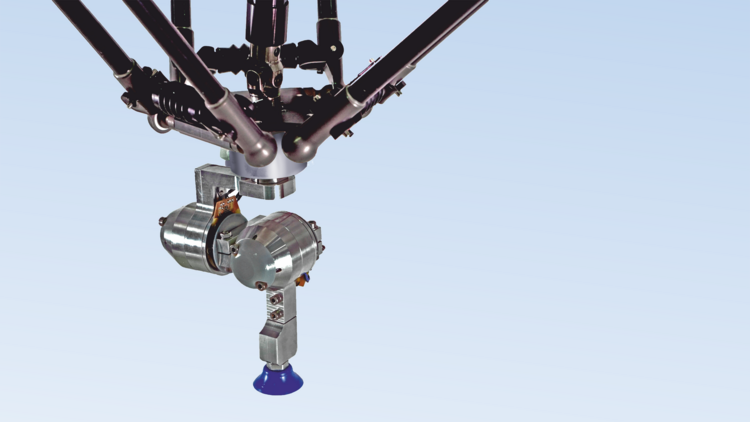
Handling systems with hybrid structures are often used for pick-and-place processes in production technology. Such systems usually consist of a delta parallel structure for the positioning of the end effector and an additional rotational axis, which is serially attached to the parallel structure. Since existing handling systems frequently need to be adapted to new production conditions, additional degrees of freedom are a desirable feature. This can be achieved by means of an orientation device, which is typically a wrist mechanism with active rotational axes.
This work will introduce a passive orientation device that can be attached as a module to the tool flange of an existing handling system, in order to counteract the compromise between maximizing the dynamics and load capacity of the robot system and the extension mechanism. Since the robot system has more degrees of freedom than actuators, it is underactuated by nature. This strategy leads to a reduction in the number of motors and components in the powertrain so that costs and influences on the dynamics of the robot system can be kept to a minimum due to the reduced robot mass. Besides, the modular character of the orientation device eliminates the need of adapation of the robot system, which facilitates the reconfiguration process.
Additional information here.



















