Handling of solar cells
| E-Mail: | raatz@match.uni-hannover.de |
| Team: | Jan Schmitt |
| Year: | 2011 |
| Funding: | DFG |
| Is Finished: | yes |
This project was conducted by the Institute of Assembly Technology and the Institute of Machine Tools and Production Technology at the TU Braunschweig.
Initial Situation
The strong brand development in Germany in recent years is partly a result of government subsidies. For this reason, the solar industry is under enormous cost pressure from Asian competitors. Production technology is a key factor in influencing quality and costs. Approaches here include minimising throughput time, saving silicon base material and reducing the handling-related reject rate.
Problem
The conflict of goals between highly dynamic and gentle handling of crystalline solar cells is the main motivation for the investigations and experiments carried out in this project. Highly dynamic parallel robots exert large forces during handling, which the gripper system must compensate for if possible. Decreasing wafer thicknesses increase the mechanical flexibility of the cell while at the same time the breaking point decreases.
Goal
The aim of the project is the application-oriented investigation of parallel robots for the highly dynamic and gentle handling of solar cells. In the process, alternative parallel kinematic structures for handling solar cells are to be designed and the functional models of the SFB 562 are to be examined for this industrial task with regard to their usability. Furthermore, the existing gripper technology is to be analysed and optimised with regard to the constantly increasing requirements in terms of dynamics and thinner solar cells.
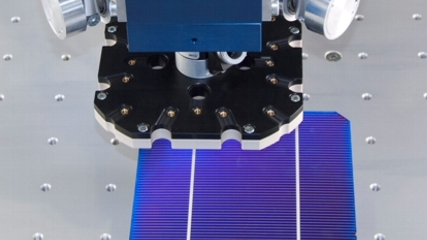
Results so far
Based on the Triglide parallel robot (SFB 562), a concept was developed to use this robot for the classification of solar cells according to their specific efficiency. The different structural configurations of the Triglide are used for this. In the field of gripper technology, investigations were carried out on the air consumption of different gripper types (vacuum, Bernoulli and vacuum area grippers) as well as other process parameters, such as holding capacity or lateral/rotational displacement of the cells. Furthermore, it was determined simulatively (FEM) how the operating principles of the grippers stress the solar cell. It was shown that the surface suction gripper offers the best performance in terms of the process parameters, both in the simulation and in the handling experiments.
Project partner: J. Schmalz GmbH



















