Präzisionsmontage
| E-Mail: | stucki@match.uni-hannover.de |
| Team: | Martin Stucki, Rolf Wiemann, Niklas Terei, Lars Binnemann |
| Jahr: | 2018 |
| Förderung: | Grundfinanzierung |
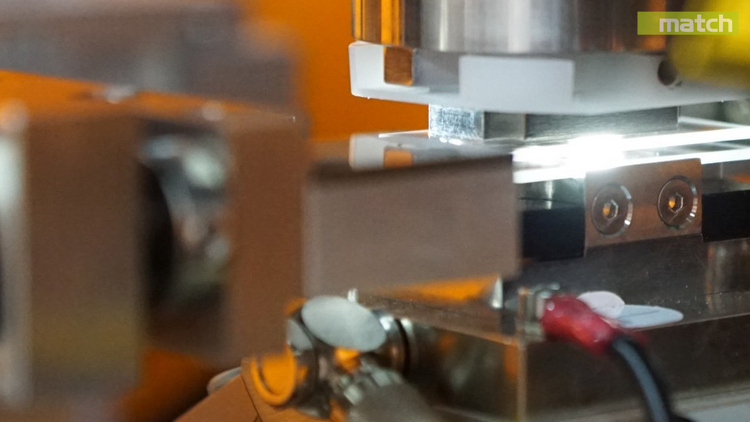
In der Präzisionsmontage werden Bauteile auf wenige Mikrometer genau montiert. Übliche Anwendungsfelder sind Produkte in der Medizintechnik, im Bereich der Mikromechanischen Systemen (MEMS) und der optischen Systeme. Konventionelle Roboter und entsprechende Peripherie stoßen bei derart hohen Genauigkeitsanforderungen an ihre Grenzen. Das Institut für Montagetechnik entwickelt neuartige Montagestrategien und –prozesse, um diesen hohen Anforderungen gerecht zu werden.
Ein Schwerpunkt der Forschungstätigkeiten des match ist die Entwicklung von Klebprozessen, da das Kleben einen wesentlichen Einfluss auf den Montageprozess und die Produktqualität hat. So beeinflusst der Klebstoffschrumpf maßgeblich die Montagegenauigkeit und die Kombination von Klebstoff und Aushärteparametern bestimmt sowohl die Festigkeit der Fügeverbindung als auch die Taktzeit des Prozesses.
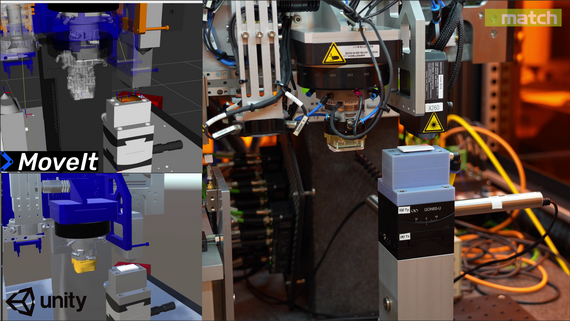
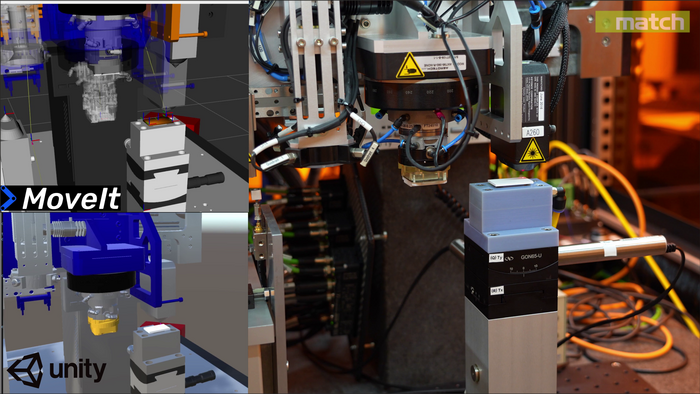
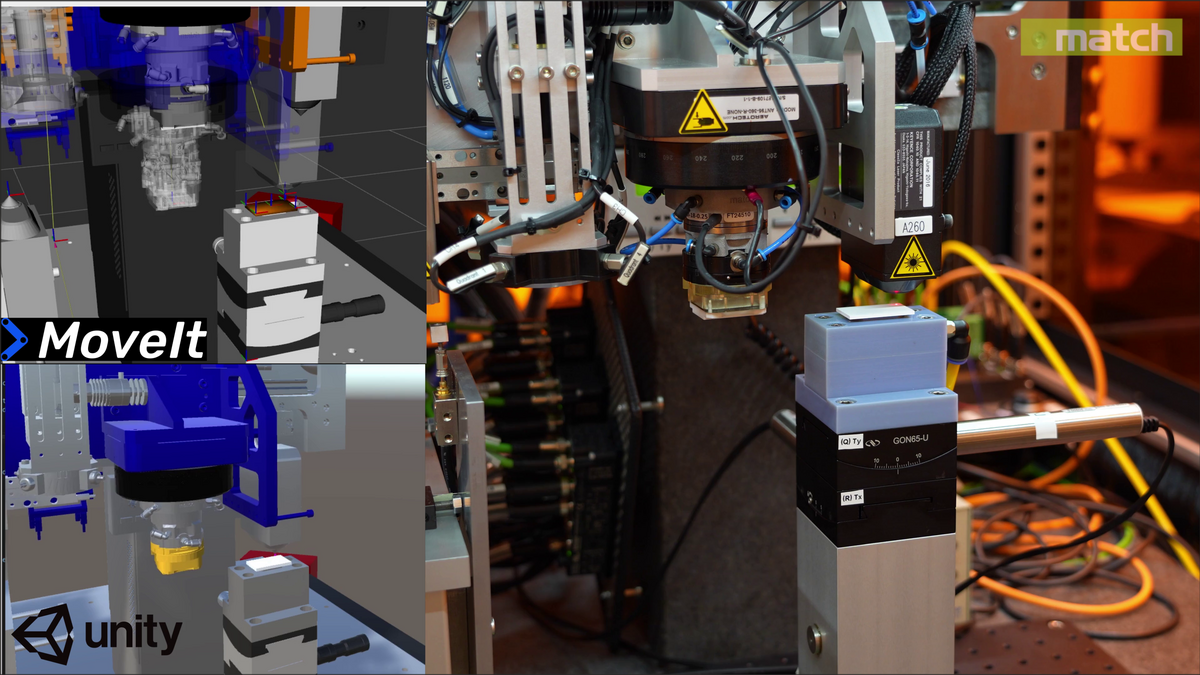
Ein weiterer Fokus liegt auf der Entwicklung neuartiger Handhabungssysteme, was Vorrichtungen für manuelle Präzisionsmontageaufgaben bis hin zu vollautomatisierten Lösungen umfasst. Ein Ansatz ist der Einsatz eines magnetischen Levitationssystems, bei dem ein Werkstückträger gleichzeitig für den Werkstücktransport und für eine präzise Bauteilmanipulation im Mikrometerbereich genutzt wird. Dies ist daher ideal für den Einsatz in einer inline-Produktionsanlage und zur Verkettung verschiedener Prozesse. Entscheidend bei der Verkettung ist zudem die Durchgängigkeit der Prozessdaten. Hier forscht das match an sich selbst optimierenden Prozessen, indem Simulations-, Entwicklungs- und Fertigungsdaten in einem virtuellen Modell des gesamten Montagesystems fusioniert werden.
Im Forschungsbereich der Self-Assembly befasst sich das match mit der Entwicklung von selbst positionierenden Systemen, sodass für eine präzise Montage keine hochgenauen Handhabungssysteme mehr notwendig sind.
Ansprechpartner: Martin Stucki, Rolf Wiemann, Niklas Terei, Lars Binnemann