Handhabung von Solarzellen
| E-Mail: | raatz@match.uni-hannover.de |
| Team: | Jan Schmitt |
| Jahr: | 2011 |
| Förderung: | DFG |
| Ist abgeschlossen: | ja |
Dieses Projekt wurde durch das Institut für Montagetechnik und das Institut für Werkzeugmaschinen und Fertigungstechnik der TU Braunschweig bearbeitet.
Ausgangssituation
Nach einer starken Markentwicklung in den letzten Jahren in Deutschland, die nicht zuletzt durch staatliche Förderungen bedingt ist, steht die Solarbranche unter einem enormen Kostendruck durch asiatische Wettbewerber. Die Produktionstechnik ist ein wesentlicher Faktor, um die Qualität und die Kosten zu beeinflussen. Ansätze hierbei sind die Minimierung der Durchlaufzeit, die Einsparung von Silizium Grundmaterial und die Verringerung der handhabungsbedingten Ausschussrate.
Problemstellung
Der Zielkonflikt zwischen hochdynamischer und schonender Handhabung von kristallenen Solarzellen ist für dieses Projekt die maßgebliche Motivation für die durchgeführten Untersuchungen und Experimente. Hochdynamische Parallelroboter üben bei der Handhabung relativ große Kräfte auf, die das Greifersystem wenn möglich kompensieren muss. Sinkende Waferdicken erhöhen die mechanische Flexibilität der Zelle bei gleichzeitig abnehmender Bruchgrenze.
Zielsetzung
Ziel des Projektes ist die anwendungsorientierte Untersuchung von Parallelrobotern zur hochdynamischen und schonenden Handhabung von Solarzellen. Dabei sollen alternative parallelkinematische Strukturen zur Handhabung von Solarzellen konzipiert und die Funktionsmuster des SFB 562 für diese industrielle Aufgabe bezüglich ihrer Einsatzfähigkeit untersucht werden. Des Weiteren gilt es die bestehende Greifertechnik bezüglich der stetig steigenden Anforderungen hinsichtlich Dynamik und dünner werdenden Solarzellen zu analysieren und zu optimieren.
Bisherige Ergebnisse
Auf Basis des Triglide Parallelroboters (SFB 562) wurde ein Konzept erarbeitet, um diesen Roboter für die Klassierung von Solarzellen entsprechend ihres spezifischen Wirkungsgrades einzusetzen. Dabei werden die verschiedenen Strukturkonfigurationen des Triglide verwendet.
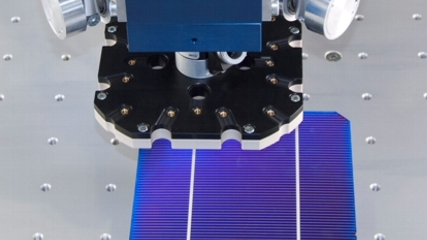
Im Bereich der Greifertechnik wurden Untersuchungen zum Luftverbrauch verschiedener Greifertypen (Vakuum-, Bernoulli- und Vakuumflächengreifer) sowie anderer Prozessparameter, wie z.B. Haltefähigkeit oder laterale/rotatorische Verschiebung der Zellen durchgeführt.
Weiterhin wurde simulativ (FEM) ermittelt, wie die Wirkprinzipien der Greifer die Solarzelle beanspruchen. Es konnte gezeigt werden, dass der Flächensauggreifer sowohl in der Simulation als auch in den Handhabungsexperimenten die beste Performance hinsichtlich der Prozessparameter bietet.
Projektpartner: J. Schmalz GmbH



















