Active Suction Device for Deep-Sea Applications (ASDDSA)
| E-Mail: | peters@match.uni-hannover.de |
| Team: | Jan Peters, Cora Maria Sourkounis |
| Year: | 2022 |
| Funding: | DFG |
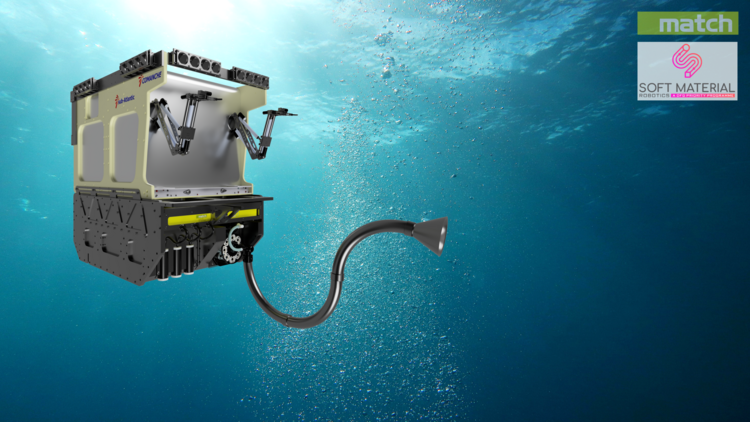
Not least because of its extreme conditions, the deep ocean still is largely unexplored, yet it receives steadily increasing attention as a source of natural resources and a driver of the global climate alike. For robotics, the deep sea thus offers harsh operating conditions in a promising field of application. One of the main tasks of diving robots (ROVs, Remotely Operated Vehicles) used for research is sampling flora, fauna, and rocks. This is currently still done by hydraulic manipulators developed for industrial purposes. A refinement, especially for sampling, are suction samplers. Such a flexible hose acting in analogy to a vacuum cleaner is gripped at a handle by the manipulator and guided to the place of use. Rigid hydraulic manipulators designed for industrial use are neither particularly precise and agile nor energy-efficient for this task. This project aims to turn the previously passive suction sampler into an active system and thus make it independent of rigid manipulators. For this purpose, several soft hydraulic actuators made of silicone are combined to reach across a large working space. The soft robot will be actuated with seawater and controlled remotely from the tethered deployment ship. The project also covers all the required peripherals and equips an actual industrial ROV with a pump, sampling mechanism, actuation unit and an adapted ROV carrier system. The project's goal is thus a soft robotic based, application-ready system for sampling in the deep sea. To achieve this, the soft robotics expertise present at match, and corroborated during the first SPP2100 phase, is combined with practical knowledge of operational, developmental and environmental prerequisites of marine technology, contributed by GEOMAR.



















