Robot-assisted cooperative handling and assembly
| E-Mail: | blankemeyer@match.uni-hannover.de |
| Team: | Sebastian Blankemeyer |
| Year: | 2015 |
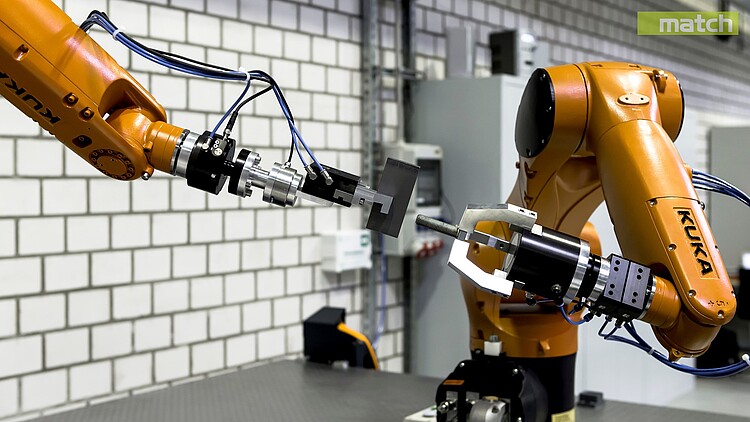
The handling and assembly of compliant and large-scale components is an important step in the process chain, especially with regard to fiber composite production. The problems that can occur when handling flexible components are their shape changes, which can lead to an undefined deposit placement position. Furthermore, gripping with conventional grippers is often not possible.
For this reason, we at match are researching new gripping principles and processes that enable safe handling. Furthermore, in order to improve handling, cooperative robot-robot assembly processes and the required safety and sensor concepts are being considered. The resulting results are then transferred into gripper designs and validated in corresponding test scenarios.
Figure: Helge Bauer



















