Active image-based feeding of small parts using aerodynamic chicanes
| E-Mail: | shieff@match.uni-hannover.de |
| Team: | Dasha Shieff |
| Year: | 2022 |
| Funding: | DFG (German Research Foundation) |
Modern production systems are subject to a variety of requirements. On the one hand, there is high cost pressure, as a result of which a high degree of automation is usually sought, particularly in high-wage countries. On the other hand, production is confronted with an increasing number of variants and greater planning uncertainty due to globalized markets, which necessitates a high degree of flexibility in the operating resources used. Particularly in assembly, which represents a central subarea of production, flexible automation solutions must consequently be developed that enable dynamic adaptation to changed boundary conditions.
A decisive component of automated assembly is the feeding device, which provides the handling device (e.g. industrial robot) with the components to be assembled in a defined position and orientation (pose). For the feeding of small parts, vibratory conveyors are often used. In most cases, mechanical chicanes are used to either actively bring the components into the correct orientation or to passively sort out incorrectly positioned parts. Active processes achieve higher feed rates and reduce wear on the components, but at the same time, they are more susceptible to faults and more complex, and usually less flexible. Although many approaches exist to make existing concepts, such as vibratory bowl feeders or linear vibratory feeders, more flexible with the aid of image processing and special actuators, there are no holistic concepts for a component-independent feeding system.
The aim of the current research project is to investigate methods for active image-based feeding of components using aerodynamic orientation modules. As described above, high feeding rates can be achieved by the active method, while the use of image processing and aerodynamic actuators provides a high degree of flexibility with regard to the component shape. The use of compressed air for the manipulation of workpieces has already been scientifically investigated in detail at the match on an aerodynamic feeding system and offers enormous potential for increasing the flexibility of feeding systems.
Within the scope of the research project, the development of a simulation model for the planning of the orientation process and the training of the image processing with the help of CAD data should almost completely eliminate the set-up time and thus significantly increase the flexibility and plannability of the operating resource feeding equipment. Due to the use of aerodynamic chicanes, no changes to the hardware will be necessary to retool the system, which in addition to increased flexibility also contributes to resource conservation and thus increased sustainability.
Research is required to develop a simulation model that can calculate stable component positions and derive the necessary orientation steps. Likewise, the number, type and position of the aerodynamic chicanes must be derived from the component spectrum to be defined, so that maximum hardware flexibility is ensured. In order to train the image processing offline, using CAD data, a robust method for generating the necessary training data sets in the form of rendered images must also be developed. A particular challenge is to close the domain gap between the artificially generated images and the images of the workpieces captured by the real image processing.
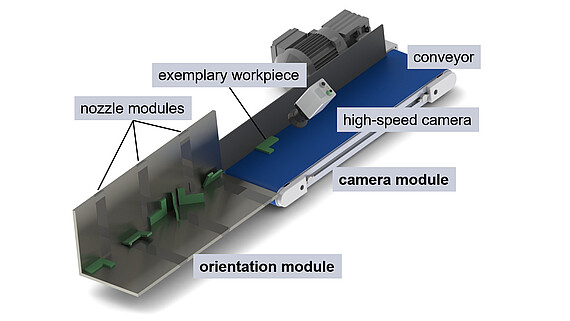
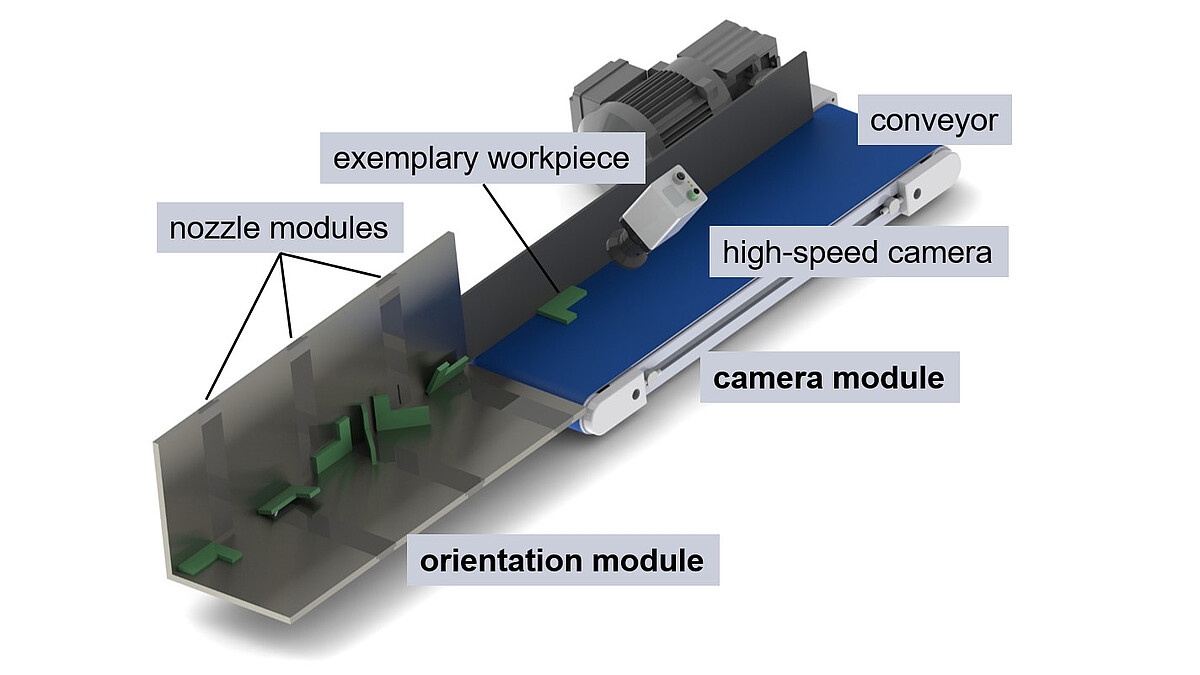
Finally, the researched methods are combined in a functional model (see figure) and evaluated with the help of previously defined validation workpieces based on defined criteria. With the successful completion of the research project, a novel feeding method is available which meets the versatile requirements of flexible assembly systems.
Functioning model