in HIS-LSF
| Course Type | Lecture + Exercise Course |
| Level | Main Studies / Master |
| Semester | Summer Semester/ Winter Semester |
| Creditpoints | 5 CP |
Course Objectives
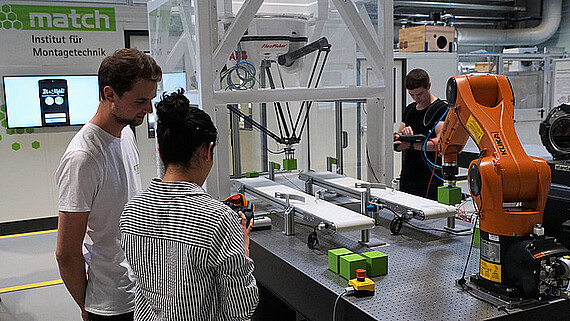
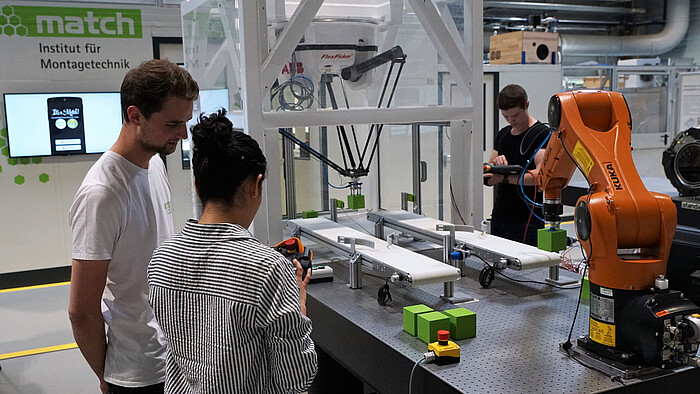
The lecture covers the theoretical and practical foundations of robot-aided assembly, using a real-life problem as example. In the beginning, an assembly problem is issued, which is then worked on in groups. Students have several longer practical units, during which they work on solutions to this problem in order to realise the assemly process. Special attention is payed to simulation, sensor integration and programming.
Course Contents
- Robot programming
- Introduction into different programming types
- Presentation of programmable logic controller
- Simulation of Assembly Processes
- Designing an assembly cell for pick-and-place application
- Simulation programme: KUKA SimPro
- Sensor integration into an Assembly Cell
- Sensor technology in robotics
- Integrating sensors into assembly cells
- Designing a real Assembly Cell
- Solving a problem
- Written elaboration as group assignment
Info: The lecture is held in German.
Exam Information and Registration
Your Professor


Prof. Dr.-Ing. Annika Raatz
Professors
Phone
Address
An der Universität 2
30823 Garbsen
30823 Garbsen
Building
Room
Prof. Dr.-Ing. Annika Raatz
Professors



















